"Innovative projects and hardware hacking"
-
INRIA-Ensta ParisTech/2014-2012
Robotics Research Engineer
Maintained and improved the control software architechture to make it more flexible, faster and easier to use with modern plateforms and middlewares.
-
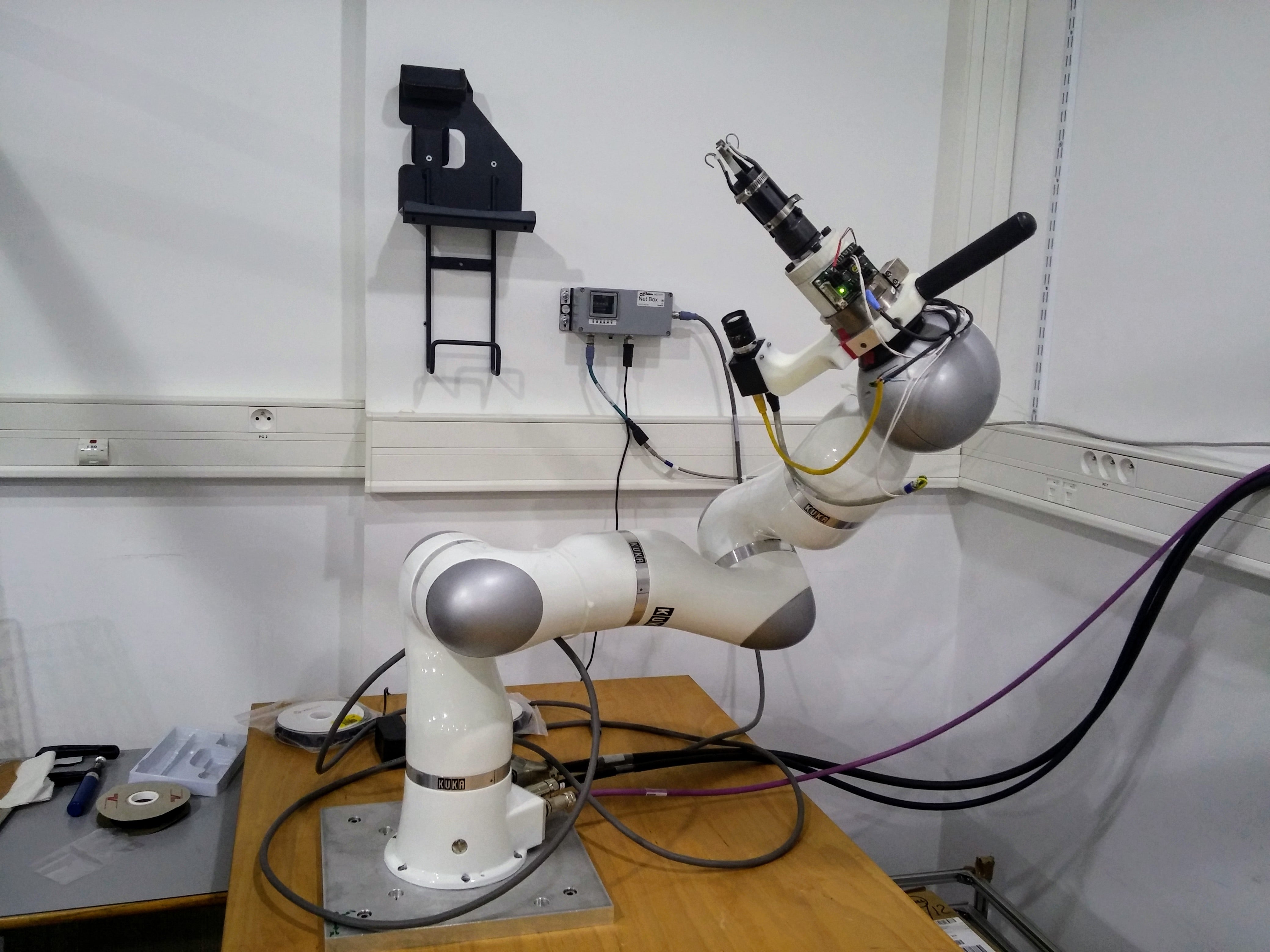
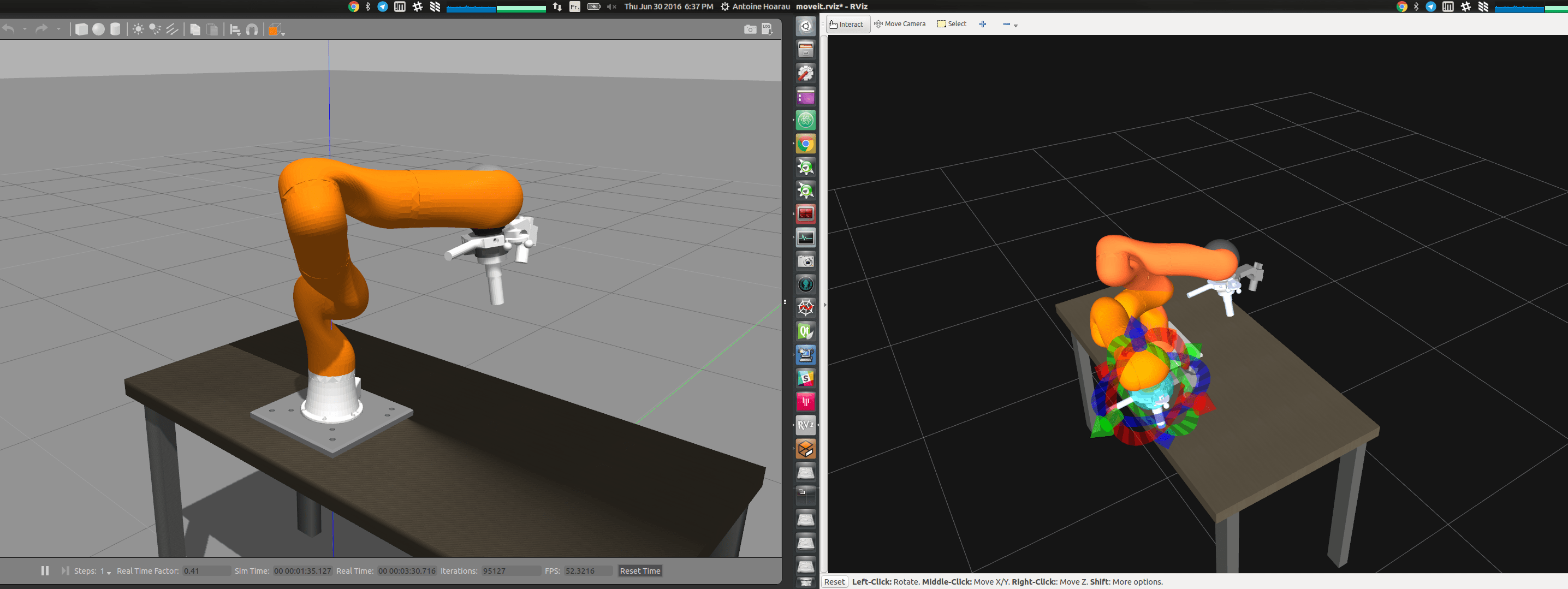
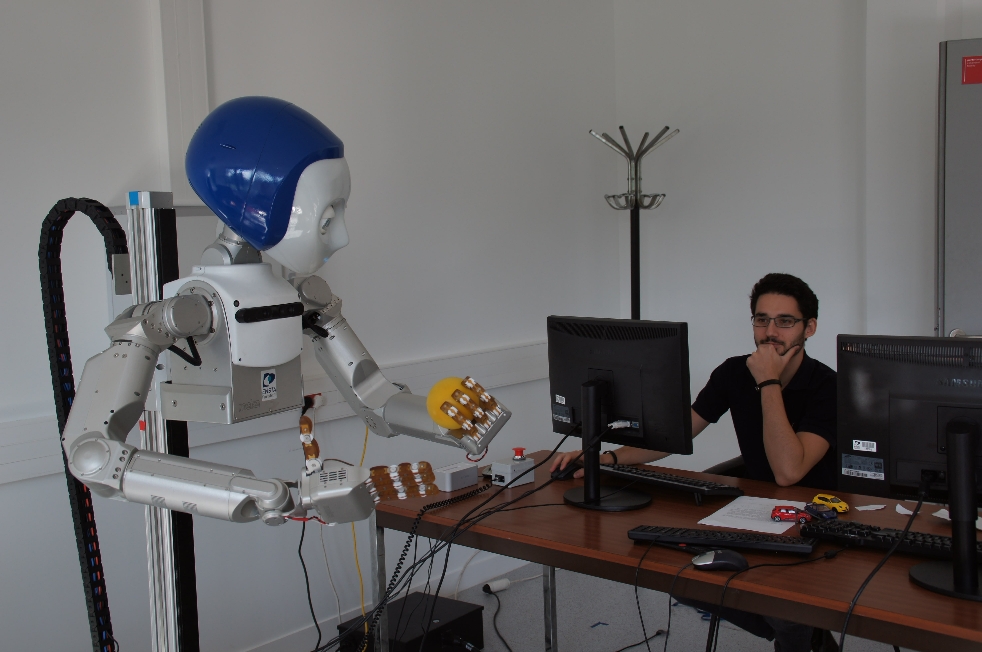
ISIR-UPMC/2016-2014
Robotics Research Engineer
Developed optimization based controllers for Kuka LWR 4+, IIWA and iCUB.
-

Studio Michaël Roulier-Foodfilm/2017
Freelance Robotics Engineer
Designed a synchronized robot/follow-focus system and user interface for filmaking with robots.
-
To
Be
Continued !